李晔教授团队在国际顶级期刊IEEE Transactions on Industrial Electronics发表论文
近日,国际顶级期刊IEEE Transactions on Industrial Electronics在线发表哈尔滨工程大学船舶工程学院水下机器人技术重点实验室李晔教授团队在波浪滑翔器领域的最新研究成果“艏向信息融合的波浪滑翔器航向控制”(“Course Control of Unmanned Wave Glider with Heading Information Fusion” )。
波浪滑翔器是近10年来应用于海洋水文、气象监测的水面无人航行器,依靠天然能源波浪能、太阳能驱动和续航,实现了能源的自给自足,无需电池等能源供给,在大范围、长时间、低成本的海洋监测中具有极大优势。波浪滑翔器具有“双体”结构,由漂浮于水面的船型浮体、潜于水下的滑翔体构成,它们之间由一条绳状的柔链连接,长久以来,由于这种独特的刚柔多体联结结构,各分体之间存在复杂的非线性耦合,难以进行机理建模,将传统海洋航行器的控制方法应用于波浪滑翔器将导致控制系统不稳定,难于控制其整体的航向,使其呈“S”型运动。
李晔教授团队依靠在智能水下机器人领域多年来积累的研究经验,针对波浪滑翔器的结构特性,提出一种艏向信息融合的自适应航向控制方法,巧妙地借助一个自修正的动态线性化模型,实现了波浪滑翔器稳定的航向控制,同时能够自主抑制环境干扰的影响,显著提高了波浪滑翔器的运动控制能力。该方法在青岛海上试验中成功获得验证。
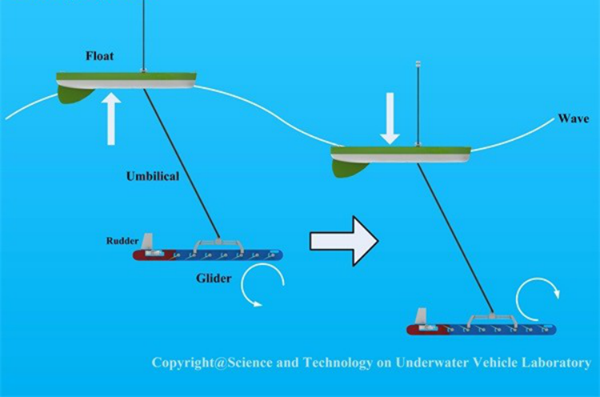
波浪滑翔器原理
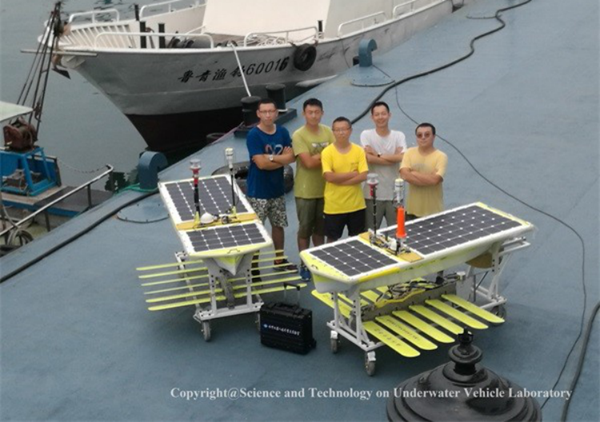
波浪滑翔器海试团队

航行中的波浪滑翔器
哈尔滨工程大学是国内首批开展波浪滑翔器研究的单位之一,相关研究得到国家自然科学基金、黑龙江省自然科学基金、黑龙江省博士后基金、中央高校基本科研业务费等基金支持。李晔教授(左三)与廖煜雷副教授(右二)为该论文共同通信作者,博士生王磊峰(右一)为该论文第一作者,潘恺文(左一)、张蔚欣(左二)为该论文共同作者。哈尔滨工程大学为论文独立完成单位。
IEEE Transactions on Industrial Electronics是电气电子与自动控制领域国际顶级期刊,主要报道信息、控制、电气及工业电子等领域最新的研究进展,期刊最新影响因子7.05,为中科院一区Top期刊。(文章来源:哈尔滨工程大学)
论文链接:https://doi.org/10.1109/TIE.2018.2884237